Ravi Pandya
Ravi Pandya
Home
Publications
Talks
Contact
Eevee
CV
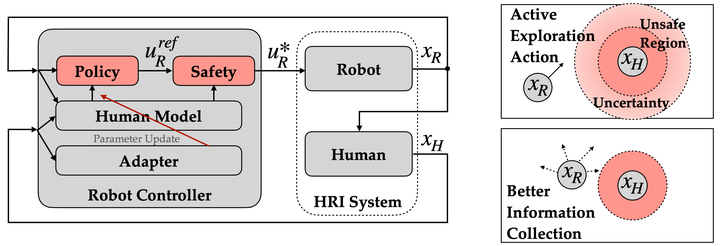
Safe and Efficient Exploration of Human Models During Human-Robot Interaction
Ravi Pandya
,
C. Liu
October 2022
PDF
Video
Publication
International Conference on Intelligent Robots and Systems (IROS) 2022
Cite
×