Abstract
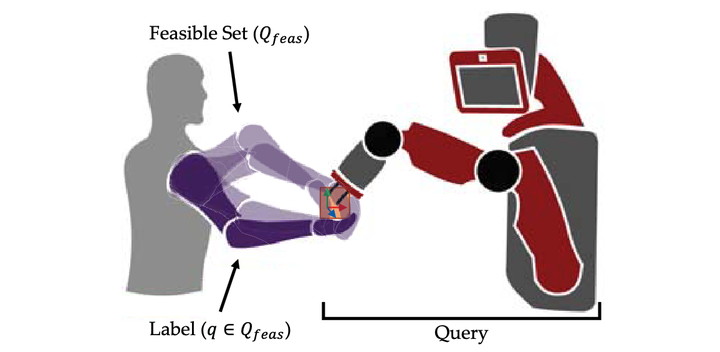
We focus on understanding how to best learn ergonomic preferences from a human in object handovers, since each person will have individual comfort preferences or constraints. We study an active learning approach to learning a human ergonomic cost function compared to passive and random baselines, and find that while active learning estimates the human’s cost function quickly, it incurs a higher ergonomic cost during learning.
Publication
International Conference on Robotics and Automation (ICRA) 2018