Robustness Analysis of Nonlinear Controllers
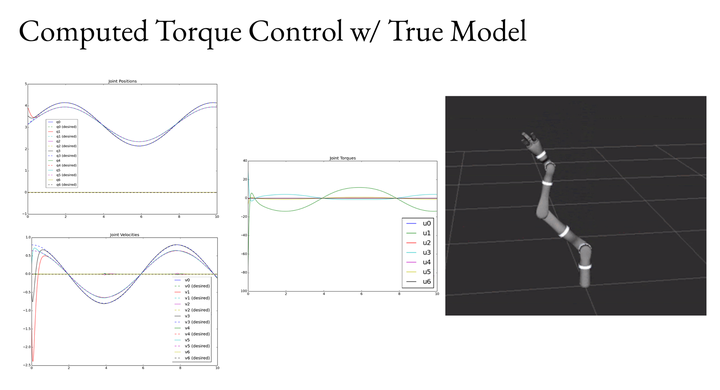
Analyzed the robustness of nonlinear controllers (Feedback Linearizing, Adaptive, Computed Torque, Sliding Mode) under disturbances and model misspecification for a 2DOF Matlab simulated robot arm and a 7DOF Kinova Jaco in a C++ ROS framework utilizing Gazebo.